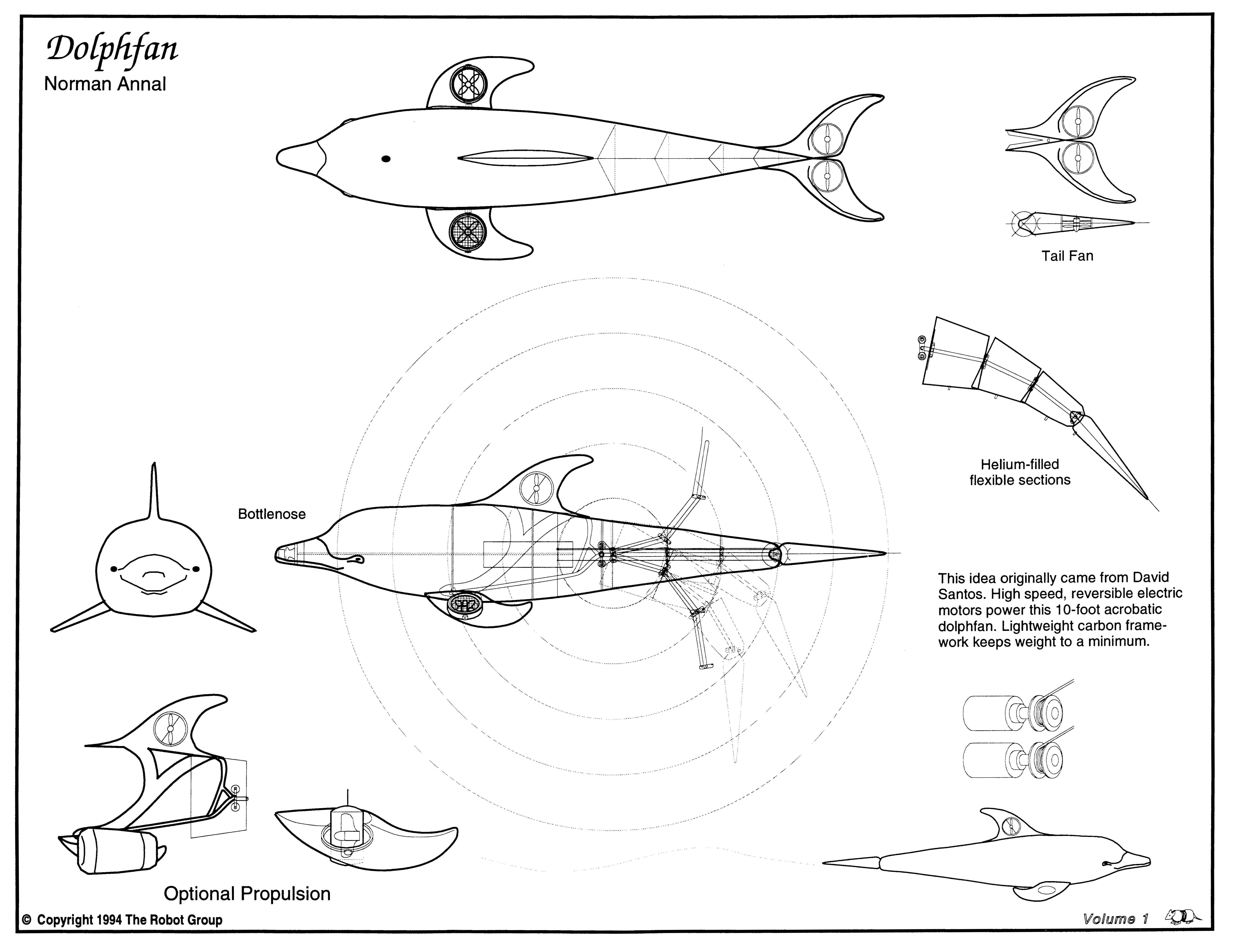
Dolphan was a project by Norm Annal, inspired by the work of Dave Santos
Keeping Austin weird before weird was cool
Dolphan was a project by Norm Annal, inspired by the work of Dave Santos
The Great Wall O’ Gizmos is a continually-growing exhibit of interactive junk art technology by Brooks Coleman. It made its debut at RoboFest 4 (1993).
The boxes in the wall are modular and can be stacked and connected in different ways. A multitude of clocks, sequencers, lab timers, and dishwashing machine timers turn dissected appliances and gizmos on and off like crazed monkeys.
This is another creative use of recycled material from our resident junk yard art genius.
Rover, another Wan Yik Lee creation, was a homebrewed robotic base powered by two motorized wheels which were controlled based on differential velocity. A SONAR system was mounted on top of the base.
The base had a dedicated microcontroller to allow it to accept various motion commands through a serial port. Encoders wee mounted on the motors to provide motion feedback.
The SONAR system consisted two parts :
a) a ring of sixteen uniformly-mounted Polaroid SONAR transducers, and 2) a microcontroller with two Polaroid SONAR drivers to accept various sensing commands and to control the operation of the sensing system.
The SONAR ring was adjustable to a height between 30 inches to 38 inches and could be programmed to sense according to various schemes.
Rover had been dressed up as a space-age android, and exhibited as a human transporter in RoboFest 4 (1993) and RoboFest 5 (1994). It served hundreds of human drivers using a Nintendo joystick controller as the interface for motion command.

Dweebvision, a low cost video telepresence rover, is one of Glenn Currie‘s creations. A durable as it is simple, Dweebvision has survived operation by hundreds of kids over five RoboFests and many school events.
The Dweebvision vehicle is a radio controlled toy car, equipped with Pixelvision video camera and transmitter.
The chassis is made out of an “after Christmas” special 4-wheel drive truck from Radio Shack. The remote control for steering the base is on ~27 MHz. and offers no interference for the 900 MHz. audio-video transmitter. The unit runs for about 4 1/2 hours on one set of alkaline batteries. I added a xenon strobe to Dweeb for safety because all kids want to do with it is drive up behind someone and have them trip over the robot.
The person at the control station sees and hears the world in Dweebvision, and can control the car as it navigates its surroundings by viewing a monitor. Many of the children visiting RoboFest watched in amazement as no one seemed to be controlling the RC car. The navigator can sit out-of-sight from the vehicle and have a little fun teasing the kids.
“I built the group’s first telepresence bot called Dweebvision. It has (yes, it is still working) a Fisher Price Pixelvison camera attached to a 900MHz. audio / video transmitter. Dweeb sends back live video and sound. The automatic audio gain control in the Pixelvison camera works perfectly – reducing the audio while the unit is driving around and the noisy plastic gear motors are on and increases the microphone sensitivity when the motor noise stops.”
Glenn Currie
Dweebvision was built, overnight, before Robofest III, after collecting all the parts over the period of a few months. It gets updated, at times, with a night vision camera and has been used to scout out problems under an ice rink and look for pets under houses. Dweeb is a telepresence device and is run by a remote operator. It has no on-board microprocessor or brain. When I was in school we called a person with no apparent brain and a head filled only with that which was put there by others, a “Dweeb”.
“Dweeb has been used in countless demonstrations over the years. I found attaching the camera and video transmitter with rubber bands and Velcro was the way to go. Anything less flexible was trashed in no time. With rubber bands and Velcro I simply pick up the “big chunks” of the robot after it has been stepped on and mash them back into place. Most schools have walls of enameled brick and Dweeb gives a great demo when driven between desk legs in nearby classrooms. Dweeb is small and travels in a cardboard file box to school demos.”
Glenn Currie
Dweebvision was the first of the telepresence robots created by Robot Group members. The Mobile Platform followed soon afterwards.
The Robot Group, in a collaborative effort, produced an installation entitled “Berzerkwerks” which was on display during August of 1991, at the Austin Children’s Museum.
The work consisted of various computerized kinetic sculptures interactively-controlled by a central computer through a video input device. The observer’s moving image was dynamically captured by a video digitizer, and mixed with computer graphics. Interaction of the captured image with the computer graphic objects controlled the behavior of the sculptures. The combined image was then projected onto a large screen.
In addition, several of The Robot Group members participate in an annual Berzerkwerks outing now called Jump Start.
The program is taken to local elementary schools in at-risk areas. These shows are very popular with the kids. By encouraging these youth to be interested in science at a young age, we hope to help them stay interested in school.
Who knows? The next Einstein could be right in our backyard.
Another effort of The Robot Group has been to develop a multi-purpose microcontroller system appropriate for controlling motors, sensors, and other devices.
Connected together in a network, groups of these systems can be controlled via a higher level central computer. This can be used to control complex robotics systems and can produce striking behavior of museum exhibits, and information about exhibit behavior and crown activity and interaction from one exhibit to the next.
The Exhibit Controller Board was initially designed as part of the Berzerkwerks (Aug. ’91) exhibit at Austin’s Children’s Museum and subsequently has been used in several Robot Group projects.
It incorporates a methodology to allow the onboard Motorola MC68HC11E9 microcontroller to control up to 28 servo motors. Each system provides connection for a Motorola MC68332BCC, a small but powerful MC68332-based computer system, which may act locally or serve as the master controller for up to 14 other systems.
Alex Iles designed the hardware and the software for servo control. He later revised the design to incorporate MIDI communications and to reduce the size of the circuit board.
Bill Craig developed a real-time distributed operating system allowing the network of exhibit controllers to operate at its full potential. The operating system runs on a Motorola MC68332BCC (which acts as the central controller) mounted on one of the networked boards.
Projects incorporating the exhibit controller include Big Rock Robotic Tower, Sparky, the Robotic Pup, and the Tai Chi Dancers (a moving sculpture consisting of choreographed robotic arms, which utilizes a network of controllers and the distributed operating system).
The pit bull has a nasty reputation as a cruel and vicious breed. In Austin, TX, there lives the Mechanical Pit Bull, a beast so ferocious and fierce that even the most stout-hearted bull terrier would flee in terror.
The Mechanical Pit Bull, a nightmarish dog-like contraption, some six feet long, is built from heavy-duty welded and bent pieces of sheet metal. It twists about, thrashing its jagged-edge legs and jaws, and its thick electro-pneumatic torso.
As it moves, the metallic sound of its grinding, metal legs and the hissing from the compressed air create an eerie atmosphere for this robotic entity. No one dares to challenge this beast. No one, that is, except Brooks Coleman.
Brooks, a founding member of The Robot Group and the creator of the Mechanical Pit Bull, often wrestles with his creation in dangerous displays of man vs machine.
Has the Mechanical Pit Bull ever bitten the hand that feeds it? “Yes. Many times,” according to Brooks who used to have a lot more hair.
Note 1 : There is some evidence that the Mechanical Pit Bull evolved from the Centipede that appeared at RoboFest 1 (1989).
Note 2 : It is unclear, at the moment, whether the Mechanical Pit Bull appeared at the Cyberspace Convention, hosted by The Robot Group (1990); however, it did appear at RoboFest 2 (1991).
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine. Some links may have been added, removed, or updated.

“DECtalk is a text-to-speech converter that provides any computer with a human-sounding voice. You can enter the text from a host computer or a terminal keyboard connected to the unit. You can hear the resulting speech through the built-in speaker, a headset, external speakers with an amplifier, or a telephone. You can also display the spoken output on a monitor screen or print it in hardcopy form.”
DECtalk model DTC01 documentation
This unit, pictured above was owned and operated by Eric Lundquist. It was utilized both the for the Robot Brain and Babbling Head projects .
For a short history of DECtalk development by Edward Bruckert, see here. Thanks to Tom Morin for locating this link.
[Text and image originally from http://wiki.therobotgroup.org/wiki/DecTalk]
In between RoboFest 1 and RoboFest 2, The Robot Group hosted the Cyberspace Convention on 04-06 May 1990, at Discovery Hall, our second consecutive record-breaking event at that venue.
This event showcased the Sense8 WorldToolKit virtual reality SDK, developed by Eric Gullichsen. Gullichsen, former project leader for Autodesk’s Cyberspace Project, is the founder of the Sense8 Corporation.
He came to the convention from California to demonstrate his software and to instruct users on the Sense8 system.
In organizing the convention, The Robot Group attracted the attention of a group of scientists who were attending an international conference on cyberspace at the University of Texas at Austin.
The Robot Group thrilled the crowd of scientists, artists, and curious children with demonstrations of their most famous devices as well as new works like the Bipedal Ornithopter, a 12-foot long airship propelled by mechanical legs and insect-like wings.
Also on display was a Space Shuttle Simulator developed by Austin’s Kealing Junior High (now, Kealing Middle School) students with assistance from The Robot Group.

Also on display was a Space Shuttle Simulator developed by Austin’s Kealing Junior High (now, Kealing Middle School) students with assistance from The Robot Group.
This mock-up featured a large robotic manipulator-arm, constructed by the students from salvage. The students used the simulator to “fly” missions and accomplish tasks such as rescuing satellites and performing experiments. During these simulated missions, the ground crews communicated with the flight crew via computer terminals and video cameras.
Other exhibits included the Venus Project, the Crawling Hand, Styro Varmint, and Varmint.

The Cyberspace Convention was a celebration of the cyber-art aesthetic. Live music and performance art entertained the museum visitors and convention-goers who were waiting their turn to experience virtual reality of the robotic kind.
[Mike is seeking additional images for the Bipedal Ornithopter, the Crawling Hand Robot, the Keeling Space Shuttle Simulator, Varmint, and the Venus Project.
Let him know if you have knowledge of any other projects that were exhibited at the Cyberspace Convention.]
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine. Some links may have been added, removed, or updated.
In addition, confirmation of the exact dates was provided by determining the dates of a concurrent First Conference on Cyberspace sponsored by the School of Architecture at the University of Texas – Austin.
The Crawling Hand, an automated, air-powered, mechanical sculpture, was another of Brooks Coleman’s creations.
“The Crawling Hand was first used at a ’10 Minutes Max’ show at [perhaps] the Vortex when they were across the hall from the original location for Children’s Museum.”
Brooks Coleman
“I made it from some scrap metal I got from East Austin Pipe and Supply. It ran for about 3 shows but was too much of a hassle to store. When I moved out of the warehouse, I took it apart and used the metal for the first batch of metal bras. The rest is history.”