I am, by nature, a creature of the web. My daytime vision is excellent although I prefer to roam, far and wide, under the cover of darkness.
Nightcrawler, woodsmith, metalsmith, scientist / engineer.
The Crawling Hand, an automated, air-powered, mechanical sculpture, was another of Brooks Coleman’s creations.
“The Crawling Hand was first used at a ’10 Minutes Max’ show at [perhaps] the Vortex when they were across the hall from the original location for Children’s Museum.”
“I made it from some scrap metal I got from East Austin Pipe and Supply. It ran for about 3 shows but was too much of a hassle to store. When I moved out of the warehouse, I took it apart and used the metal for the first batch of metal bras. The rest is history.”
Throughout its history, The Robot Group’s outreach program at area primary schools has been a key activity. “Robots, Gadgets and Gizmos,” a demonstration of robot construction using common household materials, was regularly presented to grade school children identified as “at-risk” and disadvantaged.
One long-term project, the Space Shuttle simulator at Kealing Junior High (since renamed Kealing Middle School), stands above the rest. Science students learned about mechanics and computer control by constructing robot arms used in their final semester projects.
Group members also assisted Kealing students by supplying robotic arms and telepresence equipment.
Kealing Junior High’s Space Shuttle simulator
This Space Shuttle mock-up, featuring a large robotic manipulator-arm constructed by the students from salvage, appeared at the Cyberspace Convention (1990) and at several RoboFests. The students used the simulator to “fly” missions and accomplish tasks such as rescuing satellites and performing experiments. During these simulated missions, the ground crews communicated with the flight crew via computer terminals and video cameras.
This project was one of several developed by David Santos.
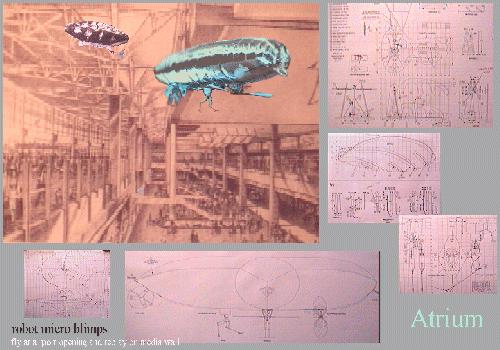
Bipedal Ornithopter designed and built by Dave Santos and George Parks
“It runs on two legs, flaps wings to take flight, and flies nimbly about the nooks and crannies of urban landscapes.”
description from an early web site
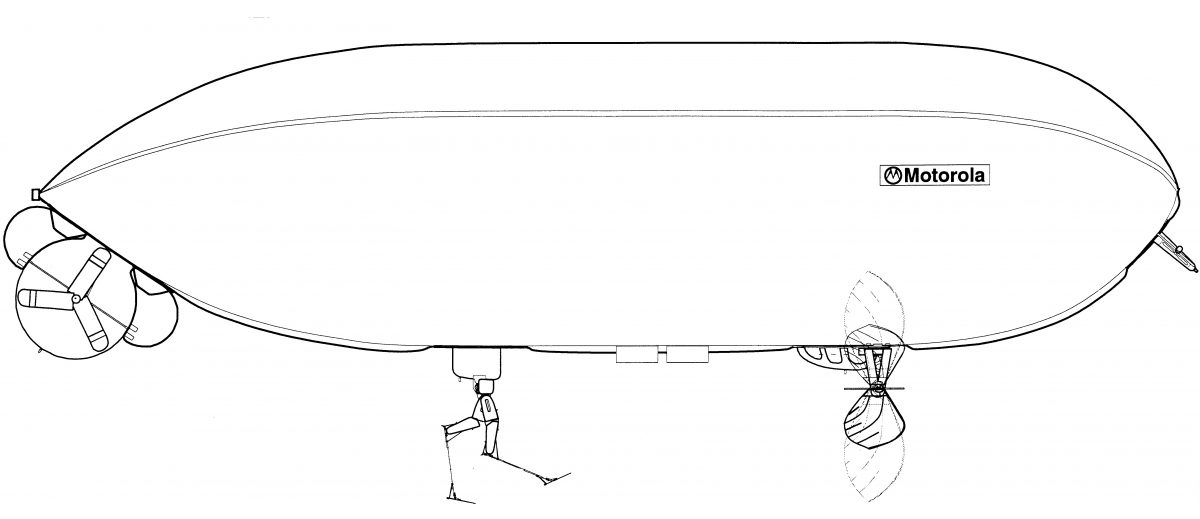
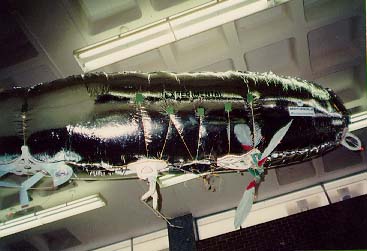
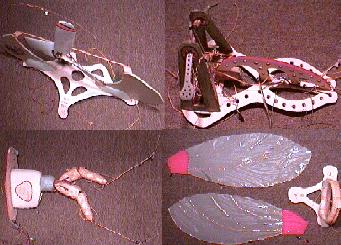
The blimp was a 12-foot-long airship with running legs (lower left) and insect-like wings (lower right).
It was one of The Robot Group’s most popular projects and had been featured on the Discovery Channel’s Invention Series, on ABC’s Good Morning America, and in Newsweek magazine.
Poster for the Bipedal Ornithopter, one of The Robot Group’s most popular exhibits. Designed and built by Dave Santos and George Parks.
On November 5th, 1989, the first public exhibition of The Robot Group’s work was held at Discovery Hall, a hands-on science museum in Austin (no longer in existence).
The event was called RoboFest and it broke all previous attendance records at the museum. We are sorry that Discovery Hall did not survive as an entity. This happens to a lot of non-profit groups; however, the spirit of Discovery Hall lives on in other organizations like ours that continue to push the science education envelope.
A large and curious crowd collected, eager to see The Robot Group’s imaginative creations which included :
Varmint, a four-legged, computerized, walking, pneumatic-driven sculpture
An eight-legged, segmented, metallic Centipede [1]
A Fish Blimp that swam through the air, using its tail fin for propulsion
The Mark I Cybernetic Airship with an on-board computer controlling the speed and angle of its two propellers
The Venus Project, an interactive environment in which the participants created music and computer graphics by dancing in a stomp-pad while wearing headgear with tilt-sensors wired to a synthesizer
[1] Brooks Coleman has suggested that the Centipede evolved into the Mechanical Pit Bull.
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine. Some links may have been added, removed, or updated.
Brooks Coleman created four of these for one of the early RoboFests.
“One of the 4 “joint task” robots I made for a Robofest years ago. 2 independent drive wheels with a front skid and gripper to be able to grab things and move them around. “
The Babbling Head Robot, better known as Babbling Head is one of The Robot Group’s iconic exhibits.
Babbling Robot Head is perhaps one of the finest examples of our group’s efforts to meld art and technology. It is certainly one of the classiest. Brooks Coleman, a genius at wood-crafting, designed and crafted the various wood elements that went into this piece. These wood elements are as diverse and as rich as purple heart and oak and as raw as tanzania root.
The base of the piece is purple heart wood and the neck and collar bones are pow amavia woods. The organic brain in this robot is a piece a tanzania root that Brooks filed and fitted perfectly to this piece. The rawness and natural ridges of the wood root give it a very natural organic-looking brain.
Brooks, who also does metal forging, tailored the metal nose and half head piece for Babbling Head while Laurie Davis forged the eyes.
The eyeballs are hammered silver with LEDs illuminating the iris centers. The eyeballs are also servo-controlled and capable of rolling.
The neck and the lips are made of soft plastic for mobility. The lips are molded black silicone and the neck-pipe piece is actually a dryer vent pipe.
The servos are each fitted with a winch pulley which Brooks turned from nylon. He machined a custom tool to create the spline that fits the standard Futaba servo shaft.
This robot is fitted with a Mini SSC II board that operates a series of hobby servo motors that move the lips, eyeballs and neck areas.
The DecTalk provides the computer voice that brings the Babbling Robot Head to life.
Alex Iles was instrumental in developing and programming the original exhibit controller for this piece. Bill Craig assisted with the original programming and the speech synthesis. Later, Eric Lundquist added real-time speech synchronization with the DecTalk.
At times, Babbling Head has been integrated into the Robot Brain project.
When last it spoke, Babbling Head revealed that it was awaiting some surgery. We look forward to its reappearance and to hearing it sing again.
Did we mention Babbling Head’s popularity? Some notable appearances :
2007-03 dorkbot / SxSW Festival (covered by BBC News)
The Venus Project was formed in the spring of 1989 as an independent cyberart coalition whose members embraced the techno-aesthetic philosophy of a positive human/computer synergy. The expression of this philosophy was the use of technology in playful, educational opportunities for interaction shared with others. The Venus Project members included Bob Nagy, Karen Pittman and John Witham.
VP-1, the first public exhibit designed by the Venus Project, appeared at RoboFest (1989 show at Discovery Hall in Austin, TX).
The exhibit was a computer-mediated interactive environment for producing musical sounds by body movements and for manipulating computer graphics with those sounds.
The participant donned a helmet that actuated MIDI-controlled synthesizer sound module. Pressure-sensitive areas beneath the feet of the participant were also connected to the sound module.
The graphics display was driven by software that changed the output based on the audio pitches and the interrelation of the audio signals.
VP-2 (Sonic Silhouette), the second Venus Project work designed for exhibit at Discovery Hall, was featured in RoboFest 2 (February 1991)
In this installation, body movements were tracked by an overhead video camera and digitized. A graphical interface to the audio synthesizers, in the form of a grid, caused musical sounds to be produced.
This system acted like a virtual instrument that was played by dancing or moving inside the digitized space.
VP-3 (Musicgraphic Hyperinstrument), was designed for the Berzerkwerks installation at the Austin Children’s Museum (August 1991).
This exhibit featured several virtual worlds that the participant could “enter” through the video camera and digitizer.
These worlds, created using the Mandala System authoring software, enabled the user to create sounds, trigger animations, and to paint by moving and “touching” virtual objects.
Lights and fans in the room surrounding the exhibit were also activated by these virtual objects and acted on wind sculptures and other installations in the show.
This exhibit was modified and renamed Video Playscape and remained on display at the museum after the close of the Berzerkwerks show.
Iterations of this exhibit were the top interactive attraction at RoboFests.
Mandala System interactive computer graphic scene from the Venus Project VP-3 (Musicgraphic Hyperinstrument)
VP-4 (Living Systems Interactive Video Environment / L.I.V.E.)
In February 1992, the Austin Childrens’ Museum commissioned the Venus Project artists to create a virtual representation of the human digestive system.
The Mandala System was used to design scenes for the Video Playscape which made an educational game of the process of digestion. It featured an interactive tour of the digestive tract with animations, sound samples, and music.
VP-5 (Performance Interfaces) emerged in April – May 1992. The Venus Project designed and performed with several new virtual interfaces for control of audio synthesizers accompanied by the Sainsott’s Shrinking Robot Heads Band.
The debut performance for the combined organic and inorganic groups was held at X/XX2 Experimental Musical Festival on April 4, 1992. The performance featured an ensemble of six live (organic) musicians as well as the Shrinking Robot Heads Band members.
The interface was used to play synthesizers as the performers moved inside a digitized space.
Venus Project interfaces were also designed to be used in performance at Mayfest in Tulsa, OK and at RoboFest 3 in Austin that year. In both of these events, the interfaces were also to be used experimentally by the audience.
Varmint, a four legged walking machine, was born in 1986. It became the first computer controlled robot project of Silicon Barrio and The Robot Group. When Varmint took its first steps in the world, its creators were as proud as any real parents could be. As the first-born Robot Group project, Varmint paved the path for many of its siblings that followed soon after.
Varmint demonstration at MCC auditorium
David Santos designed and coordinated Varmint. He also helped Joe and James Perez with the metal fabrication of the project. Mark Dommers implemented Varmint’s computer control and electronics. Brooks Coleman worked-out the pneumatic actuation control. Norman Annal drafted the design specifications for Varmint.
Varmint made regular appearances at RoboFest. It is an old robot now but it is still active.
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine. Some links may have been added, removed, or updated.