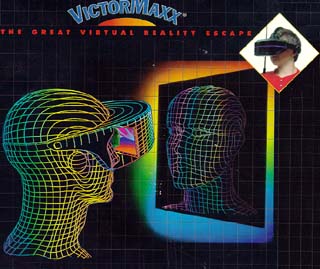
RoboVision was a quick virtual reality (VR) project by Tom Davidson and Sonia Santana. The aim of the project was to provide attendees at RoboFest 7 a feel for what a robot’s vision might be like.
The project’s components were two VictorMaxx Stuntmaster VR headsets which had their video inputs wired to Supercircuits microcameras. The Stuntmaster had a single camera screen. The microvideo camera was mounted on the outside of the head gear with the battery power unit worn as a belt pack. An on/off timer switch was been wired to the helmet to allow more participants equal access. The entire head unit was covered with a cardboard mask design similar to that of the Megabot Army for a cool robot head appearance.
There was ample room in the head gear to allow for downward vision so that the person wearing the helmet could walk around and avoid tripping over stuff. The camera images that were projected into the headset screen were feeds from various mobile robots such as Commander Salamander and Mobile Platform and Dweebvision.
Author: rutrohverlord
I am, by nature, a creature of the web. My daytime vision is excellent although I prefer to roam, far and wide, under the cover of darkness.
Nightcrawler, woodsmith, metalsmith, scientist / engineer.
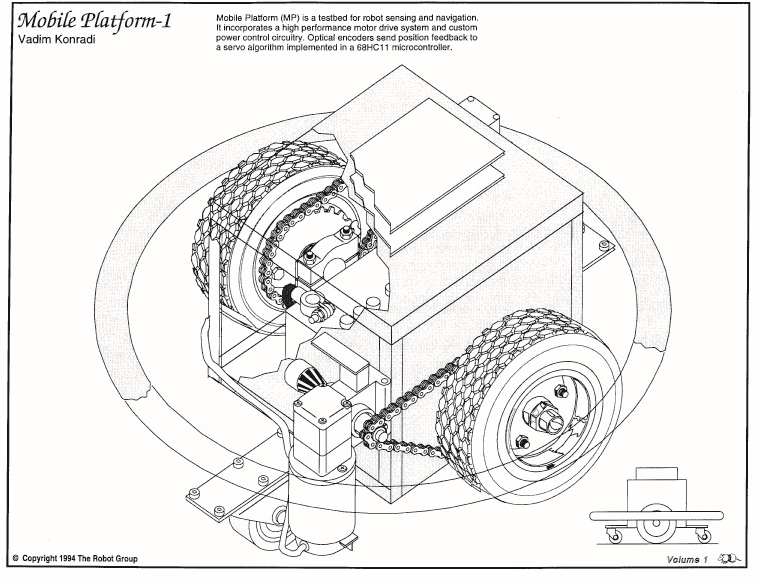
Mobile Platform
Editor’s note : The contents of this page were extracted an archived entry found on the Internet Archive’s Wayback Machine. The page, originally on Carlos Puchol’s web space at The University of Texas – Austin, was archived on 1996-12-31.
Introduction to the Mobile Platform
The mobile platform project is designed to provide ground-based mobility to experimental sensor and control systems, allowing them to traverse level surfaces such as building floors, and possibly streets and backyards. Think of it as a Hero robot on steroids.
Mobile Platform Mechanical System
The mobile platform is supported by two main drive wheels, with stability augmented by fore and aft caster wheels. Depending on distribution of weight in the platform and payload, it may be self-righting through balancing about the main wheel axis. Possible caster wheel heights are bounded on the low end by the need to negotiate unlevel surfaces and, on the high end, by the need to maintain the platform more or less level during dynamic maneuvers. Caster wheel mounting heights and possibilities for controllable height adjustments need to be investigated.

Vadim Konradi's Mobile Platform
Vadim Konradi's Mobile Platform

Vadim Konradi's Mobile Platform
Vadim Konradi's Mobile Platform
The vehicle platform is designed to fit within a 2-foot circle so it can navigate doorways and turn within its width. Currently equipped main wheels are 11.5 inches high. The platform structure is made up of 1-inch square steel tubing in a box structure. Vertical hard clearance when level is 2 inches. The top of the box structure is 12 inches above the floor. In general, platform structure below the 12 inch height is intended to be dedicated to platform mechanicals, and passenger equipment will mount to the top surface. The upper surface consists of a perimeter structure of 1-inch square tube, 10 inches wide by 11 inches fore-aft. We will equip it with mounting holes or tabs, or studs, or tape things on top with duct tape.
Platform main wheels are driven from wheelchair motors via #35 roller chain. Based on preliminary observations, motive force of the system will be limited primarily by tire friction. Based on measured motor torque of _____, and a _____ : _____ reduction ratio, the horizontal stall force will be _____. Thus a heavily-loaded platform will be able to push over or drive through certain static objects. Some motor current sensing or other safety mechanisms may be appropriate. A perimeter bumper system with contact switches will likely be installed eventually.
Mobile Platform Electrical / Electronic System
The mobile platform electronics are designed for control via a Motorola 68HC11 microcontroller Evaluation Board (EVB). The EVB receives movement commands from a higher authority and performs the necessary control functions to drive the platform motors. The EVB has been used as a basis because it is a handy development system. Eventually the motor drive circuit board will probably have an on-board HC11.
Control is currently passed to the EVB via a standard serial port for testing in conjunction with a data terminal. Eventually control will be migrated to the HC11 Serial Communications Interface (SCI) for interprocessor communication.
The motor drive power electronics reside on a circuit board with the same dimensions as the EVB and similarly placed 60-pin connector. It is capable of being mounted, with a suitable connector, as a daughter board on top of the EVB. Logic and motor drive circuitry are separate, with optical coupling of control and status signals in both directions. Motors are controlled via enable and direction signals. The enable is pulse width modulated (PWM) to control motor speed. In addition to the individual motor enables, a global driver enable allows shutdown of the entire power output stage. An overcurrent sense signal is sent back from the motor driver circuit to the HC11.
Each motor driver consists of four MOSFET transistors in an H-bridge configuration, controlled by a _____ IC. The most recent circuit version is equipped with IRF540 MOSFETS, giving it current capability of 27 A continuous, 108 A peak. This appears to be a reasonable transistor size for efficient operation at anticipated motor power levels. MOSFETS with higher current ratings may be substituted as required. The motor driver circuit is currently programmed for overcurrent limit of approximately 20 A, which may be modified by changing the current sense shunt.
Optical encoders on the motor output shafts are used to feed back motor position to the HC11. Each encoder consists of a pair of optical interrupters and an encoder wheel. The encoder sensors use a Schmitt trigger buffer to control encoder hysteresis. Optical encoder outputs are fed to the HC11 via connectors on the motor driver board. Connectors are 4-pin .100 type.
The motor driver circuit board is designed to operate with input voltage in the 5V-30V range. Full turn-on saturation of the MOSFETS is not guaranteed below 10V, so operation is not recommended in this range with a large motor load. Power connectors on the power board are Molex .093 series 2-pin connectors, connecting to male connectors on batteries and female connectors on motors. The motor drive circuit is fused with a standard automotive type fuse. The fuse should protect against melted wires and boiling batteries in the event of an output short. Current limiting by the transistor driver IC should protect the MOSFETs to some degree. This will no doubt be determined experimentally at some time.
There is an undesirable and potentially exciting design defect on the current version of the power board, resulting in runaway full-speed drive of the motors when power is removed from the control logic. This will be corrected on future versions. For the moment, it is necessary to ensure that logic power is applied prior to application of motor drive voltage, and motor drive voltage disconnected prior to disconnection of logic power.
Control Algorithm
General
The HC11 program which controls platform motion is mainly interrupt-driven. Encoder transitions are serviced as they occur. A real-time counter schedules updates of the trajectory generator and control loop. PWM transitions are controlled by HC11 internal timers, which are reset at the PWM frequency. Implementations of these functions are more or less similar to HC11 databook examples.
Movement Command Set
Platform movement is directed through commands to the HC11 via the serial port. The following is a summary of currently implemented commands :
- Calibrate – sets setpoint position equal to current position (overrides move in progress)
- Translate (direction,magnitude) – forward or reverse increment to current setpoint position
- Rotate (direction, magnitude) – rotates right or left about platform centerline
- Velocity (direction, magnitude) – gives platform velocity in specified direction
- Radius (direction, length) – specifies curve radius in conjunction with velocity commands
- Motor (direction, magnitude) – allows independent increments topology motor setpoints
- Control (various parameters) – allows resetting of control equation constants and limit values
“Magnitude”, a parameter in many commands above, is expressed in terms of encoder counts, and the relation to physical movement distance is a function of encoder resolution, gear ratio, and wheel size. Encoders should eventually be sized such that some whole number relation exists between counts and distance in standard units of measure. Radius is specified in increments of half the vehicle track.
Commands as currently implemented return prompt strings to the data terminal. Such information will be omitted for interprocessor control via the SPI.
Wheel Position Settings and Trajectory Generation
Each wheel has an associated destination position counter. The count values are modified through addition and subtraction of increments for instantaneous movements. Velocity commands cause the velocity value to be added to the wheel counts at the trajectory generation timestep interval. When a non-straight path is directed via the Radius command, the destination counts are incremented differently to achieve the desired radius. Operation at large radii is not smooth; the algorithm may be modified someday.
Translation, rotation, and velocity commands may be overlaid with predictable, though not always intuitive, results. In general, translation and rotation commands are intended to be applied disjointly, and separately from velocity commands. Velocity and radius commands are intended to be used together in a smooth manner. All commands take effect immediately but translations and rotations modify endpoint positions, whereas velocity and radius commands modify the incremental setting of new endpoints.
Eventual additions to the command set may include profiled moves, consisting of acceleration, maintained velocity, and deceleration. Other means of limiting acceleration and jerk forces via programmable limits are possible. Another feature, primarily applicable to translation and rotation commands, would be the ability to queue commands, i.e. move forward 5, turn left 2, move forward 8. Eventually the command set will probably need to be divided into two or more distinct modes of operation.
Encoder Sensing and Actual Position Determination
Optical encoders send two digital signals in quadrature to HC11 inputs. Transitions on one signal are recognized, at which point an interrupt routine reads the other signal and determines direction of encoder motion. New position is compared with previous position for the possibility of encoder error which is not really handled correctly right now anyway. Then the wheel position count is incremented or decremented as appropriate.
Generation of Motor Force Function
Voltage applied to each motor is determined via a comparison between destination position and actual position. If there is any difference, the control algorithm exerts force through the motor to drive the error to zero. The position control is implemented in a proportional-integral-derivative (PID) loop, with command-settable gain values for each term. The motor PWM duty cycle is also subject to a command-settable limit. The result of the control calculation is a duty cycle, which is used by the PWM logic to generate a PWM output from the HC11 for the motor driver circuit.
Error / Failure / Problem Resolution
Some work needs to be done in recognizing problems with platform motion such as bumping into objects, motor overcurrent, encoder / drivetrain / wheel slip, etc., and acting on these problems accordingly. The control algorithm will need to shut down activities which are causing problems and report back to its higher authority.
Balancing Act
Since the platform has two wheels, fairly responsive motors, and a dedicated controller, it may be possible to perform active balancing of top-heavy loads without relying on the caster wheels. This is actually not that farfetched, but would require some attitude-sensing hardware and algorithm development. It would also be totally cool.

RoboFest 7

RoboFest 7 was held September 14th and 15th, 1996 at Dobie Mall, Austin, Texas. Dobie Mall was one of the major sponsors of RoboFest 7 and we are grateful to them for their support.
The festival times were 10:00 a.m. to 6:00 p.m. on Saturday and noon to 5:00 p.m. on Sunday. Admission was $4.00 for adults and $2.00 for children under 12 years of age.
The Robot Film Festival, at Dobie Theatre, featured three films with robotic themes. Admission price for each film was $3.50. For more information and descriptions of the films browse the film festival web page.

An official press release was prepared along with lists of the exhibits, the exhibitors, the guest speakers, and the volunteers (without whom none of this would have been possible)
The following businesses were sponsors of RoboFest 7 :

Dobie Mall, an official sponsor of RoboFest 7
Dobie Mall, an official sponsor of RoboFest 7

The Austin Chronicle, an official sponsor of RoboFest 7
The Austin Chronicle, an official sponsor of RoboFest 7

Capital City Container, an official sponsor of RoboFest 7
Capital City Container, an official sponsor of RoboFest 7

Motorola, an official sponsor of RoboFest 7
Motorola, an official sponsor of RoboFest 7

Alternate Audio, an official sponsor of RoboFest 7
Alternate Audio, an official sponsor of RoboFest 7

Zilker Internet Park, an official sponsor of RoboFest 7
Zilker Internet Park, an official sponsor of RoboFest 7

KROX 101, an official sponsor of RoboFest 7
KROX 101, an official sponsor of RoboFest 7
Additional support and in-kind services were provided by :

Additional financial and in-kind support for RoboFest 7 was provided by TechWorks.
Additional financial and in-kind support for RoboFest 7 was provided by TechWorks.

Additional financial and in-kind support for RoboFest 7 was provided by tellabs.
Additional financial and in-kind support for RoboFest 7 was provided by tellabs.

Additional financial and in-kind support for RoboFest 7 was provided by Kinko's.
Additional financial and in-kind support for RoboFest 7 was provided by Kinko's.

Additional financial and in-kind support for RoboFest 7 was provided by Outernet.
Additional financial and in-kind support for RoboFest 7 was provided by Outernet.

Additional financial and in-kind support for RoboFest 7 was provided by Eyecon Interactive Media, Inc.
Additional financial and in-kind support for RoboFest 7 was provided by Eyecon Interactive Media, Inc.
The background material for this page is derived from archived pages (1, 2) on the Internet Archive Wayback Machine
RoboFest 7 Exhibitors

Austin Free-Net is a non-profit corporation providing public access to the Internet and emerging technologies for all Austin residents, especially those who don’t have computers in their homes. The Free-Net is a community-driven project.

CSW Communications, Inc. was a wholly-owned subsidiary of the Central and South West Corporation. Through programs such as Customer Choice & Control, CSW Communications offered communications-based energy management solutions and other communications services which provided a path for an expanded relationship with customers and allowed customers greater choice and control over their electric usage.

Digital Mystix, Inc was an advanced developer of Web applications for the Internet and Intranets. Its highly skilled team utilized its technical and multimedia knowledge to offer cutting edge products with efficiency and precision. Digital Mystix offered a wide spectrum of interactive products and services for education and corporate development.

FringeWare, founded in 199 by Jon Lebkowsky and Paco Nathan, was one of the early commercial sites on the Internet. It experimented with mixing subcultural analysis and ecommerce, hence the name “fringe” plus “ware”.
DANCING WITH THE VIRTUAL DERVISH: WORLDS IN PROGRESS – by Marcos Novak & Friends
“In its present disincarnation, consists of a series of interconnected cyberspace ‘chambers.’ Each chamber is a world unto itself, but each chamber has portals to every other chamber, forming a fully connected lattice. As a work, it is non-hierarchical, non-teleological, and inherently open-ended. A person navigating through these chambers is free to explore a series of landscapes and to discover their apparent or hidden features. It is unlikely that anyone, myself included, will ever exhaust the variety of subtle algorithmic wonders that may be encountered, since they are intimately related not only to the logic of their programs, but to the unforeseeable circumstances and patterns of each person’s passage through the spaces.” -M.N.
Supercircuits provides the world’s smallest video cameras, transmitters and recorders.
Survival Research Laboratories (SRL) was conceived of and founded by Mark Pauline in November 1978. Since its inception SRL has operated as an organization of creative technicians dedicated to re-directing the techniques, tools, and tenets of industry, science, and the military away from their typical manifestations in practicality, product or warfare. Since 1979, SRL has staged over 45 mechanized presentations in the United States and Europe. Each performance consists of a unique set of ritualized interactions between machines, robots, and special effects devices, employed in developing themes of socio-political satire. Humans are present only as audience or operators.

Tomorrow’s Women in Science and Technology (TWIST) was an Austin, Texas-based non-profit corporation. Their mission was to promote science and math education and career planning for girls and women. TWIST’s volunteer staff is composed of Austin-area scientists, engineers, librarians, business people, teachers, writers, artists, and parents working together to achieve TWIST’s goals.

Zilker Internet Park specialized in connecting both small and home businesses to the Internet.
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine.
Hexwalker
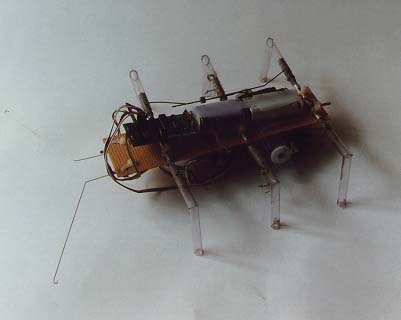
Hexwalker was built from a kit produced by M & T Systems in Huntington Beach California.
The body is made of perforated circuit board material. It has three R/C type servos driving the legs and a Basic Stamp for a brain. Antennae on the front sense obstacles and, after a few steps in reverse, send the creature off in another direction. The method used to obtain the alternating triangle gait is ingenious in its simplicity in that it can do with three servos what usually takes at least three per leg.

Top-view of M & T Systems built-from-kit Hexwalker.
Top-view of M & T Systems built-from-kit Hexwalker.

Don Colbath holding the M & T Systems built-from-kit Hexwalker.
Don Colbath holding the M & T Systems built-from-kit Hexwalker.
Don Colbath, who built this kit reports, “I was not totally happy with the construction methods and materials used and decided to build my own body and legs to attach to the existing servos and brain. This has not turned out to be as easy as I imagined and my “Hexwalker Mark II” is still undergoing refinements. My ultimate goal is to enlarge my version to about coffee table size then later to a size that a person could take a ride on. Stay tuned for future announcements.”
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine. Some links may have been added, removed, or updated.
RoboFest 7 Volunteers

- The Robot Elite Unit
- Max Aghili
- John Fisher
- Drew Glass
- Tammy Gomez
- Bob Izenberg
- Javier Lozano
- Betsy McCutcheon
- Bret Pettichord
- Jeremy Rutland
- Dawn Smith
- Lara Thompson
- Ted Tudor
- Delia Vasquez
- Gustavo Villareal
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine.
RoboFest 7 Film Festival
“Robot Invasion of Dobie Theatre”
September 14-15, 1996
. 16mm print.")
The Day the Earth Stood Still directed by Robert Wise (1951). 16mm print.
The Day the Earth Stood Still directed by Robert Wise (1951). 16mm print.
. 16mm print.")
Forbidden Planet directed by Fred M. Wilcox (1956). 16mm print.
Forbidden Planet directed by Fred M. Wilcox (1956). 16mm print.
. 35mm Director's Cut")
Blade Runner directed by Ridley Scott (1982). 35mm Director's Cut
Blade Runner directed by Ridley Scott (1982). 35mm Director's Cut
| The Robot Film Festival will feature three films with the common theme of robots. From the 50’s era of classic sci-fi come the first two entries both of which will be 16 mm prints. The Day The Earth Stood Still is a 1951 release and is in black and white. Starring Michael Rennie, Patricia Neal, Hugh Marlowe, Sam Jaffe, Billy Gray and directed by Robert Wise. Robert Wise directed dozens of pictures. An early example of his work was Born to Kill (1947). His later credits include The Andromeda Strain (1970) and Star Trek The Motion Picture (1979). “Gort, Klaatu Birada Nikto” is the famous line uttered in this film by Michael Rennie who plays Klaatu. (Or something very close to this line.) Gort is an extremely large and powerful robot with the ability to destroy the Earth. Michael Rennie is just along for the ride and to warn the citizens of Earth that they are not alone in the Universe. The second sci-fi classic is Forbidden Planet a film in Eastman Color released in 1956. Directed by Fred M. Wilcox and starring Walter, Pidgeon, Anne Francis, Leslie Nielsen, Harry Harvey Jr., Earl Holliman, Morgan Jones, Jack Kelly , Roger McGee, and Peter Miller. Fred Wilcox’ other film credits include Lassie Come Home (1946) and I Passed For White (1960). Forbidden Planet introduced us to Robby the Robot probably the most recognized robot of the 50’s sci-fi movie classics. In this film Dr. Morbius (Pidgeon) and his daughter (Francis) insist on remaining on the relatively barren planet Altair IV. When a rescue mission arrives led by Commander Adams (Nielsen) Dr. Morbius warns them that their lives are in danger and that they should leave. They don’t listen and of course strange things begin to happen just like Dr. Morbius warned. Robby is pretty much just a household servant but he’s extremely loyal to his owners. Both of these films will be shown on Saturday the 14th as matinees. The third film of the festival will be shown on Sunday afternoon. The Day The Earth Stood Still will be shown at 2:00 p.m and Forbidden Planet will be shown at 4:00 p.m. Finally to cap off the weekend of the film festival and RoboFest 7 is perhaps the best film about robots ever made. At least that’s our opinion anyway. Blade Runner the 1982 release directed by Ridley Scott will be shown in the 35 mm “Director’s Cut” version. This version is Scott’s vision for what Blade Runner should have been and not what was officially released that year. If you’re a fan of the original movie and you haven’t seen this version on the big screen – you have to see it now. Ridley Scott whose direction credits have included some of the most powerful films of the past two decades brought his dark foreboding vision of Los Angeles in 2019 alive in this film. With an exceptionally good cast of Harrison Ford, Rutger Hauer, Sean Young , Edward James Olmos, M. Emmet Walsh, Daryl Hannah, William Sanderson, Brion James, Joe Turkel, and Joanna Cassidy, Blade Runner became a cult classic almost overnight. The story is based loosley [sic] on a novel by Philip K. Dick called “Do Andriods Dream of Electric Sheep?”. The film screenplay was written by Hampton Fancher and David Webb Peoples and the haunting music score was composed by Vangelis. Ridley Scott’s other movie credits include Alien (1979), Black Rain (1989) and Thelma & Louise. The robots in this film are actually called replicants or artificially created humans. These replicants are quite sophisticated and appear very human like; so much so that it takes a special trained police person with special tools to identify them. This kind of police person is called a “Blade Runner”. The reason the Blade Runner force exists is because of a nasty little incident where replicants killed humans. That of course violates Asimov’s robot principals and is just not acceptable behavior in a robot, therefore all replicants are banned from earth. They are now only serving as slave labor in off world colonies. Deckard (Ford) is a retired Blade Runner who is forced back into action when 5 replicants, hijack a ship back to Earth with questions about their incept dates. The replicants want answers to the same questions we all want. “How long do we have to live?” “How can we live longer?” Rutger Hauer, Joanna Cassidy, Daryl Hannah and Brion James play the replicants who find life so precious that they risk meeting their maker. For real hardcore Blade Runner fans, may we suggest that you read K.W. Jeter’s excellent novelized sequel to the movie adaption. Blade Runner 2: The Edge of Human offers good insights to what might have happened after the movie. Another great book is Future Noir: The Making of Blade Runner by Paul M. Sammon with behind the scenes coverage of the film from day one. Blade Runner will be shown at 5:30 on Sunday afternoon. All of the films will only have one showing during the festival. Admission prices are $3.50 for each film. |
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine. The text of the original has been preserved without editing for spelling or grammar. Some links may have been deleted whereas the others may have been updated.
RoboFest 7 Guest speakers
All of the discussions and panels for the guest speakers were hosted in the Speaker Room, Suite #130, in Dobie Mall on the Lower Level. Admission to the room was included with admission to the festival.
The schedule, like any, was subject to change; however, as of Friday 9/13/1996, this is what was confirmed for our line up.
| Speaker / affiliation | Topic | time |
|---|---|---|
| Michael Benedikt University of Texas, School of Architecture | "The Freedom of Robots, and Ours" | SUN 4:00 PM |
| Gary Chapman Director, The 21st Century Project | "Robotics & Social Responsibility" | SAT 4:00 PM |
| Jim Choate & Ben Combee Austin Cypherpunks | "Panel Discussion Cryptography Q & A" | SAT 11:30 AM & SUN 2:30 PM |
| Spike Gillespie Self-employed Writer | "How the Internet Changed My Life" | SAT 2:00 PM |
| Dr. Benjamin Kuipers University of Texas, Computer Sciences | "Robot Exploration and Mapping Strategy" | SAT 1:30 PM |
| Jon Lebkowsky HotWired Forum & EFF-Austin | "Cyberpunks & Cyborganics" | SUN 2:00 PM |
| Forrest Mims III Self-employed Writer | "Electronics & Technical Publications" | SAT 2:30 PM |
| Dr. Raymond J. Mooney University of Texas, Computer Sciences | Artificial Intelligence "Computers That Learn to Understand English" | SAT 1:00 PM |
| Marcos Novak University of Texas, School of Architecture | "Dancing With The Virtual Dervish : Worlds in Progress" | SUN 1:00 PM |
| Mark Pauline & Mike Dingle Survival Research Laboratories | "Austin SRL Show in 1996 & Video from the Phoenix Show in 1996" | SUN 3:00 PM |
| Steve Ryan ProtoAndroid Attorney | "Legal Rights of Silicon Citizens" | SAT 3:00 PM |
| David Smith EFF-Austin | "Civil Liberties in Cyberspace" | SAT 4:30 PM |
The background material for this page is derived from an archived page on the Internet Archive Wayback Machine. Some links may have been added, removed, or updated.
Cartwheels Gizmo Box
Susan Alexander‘s Cartwheels Gizmo Box is a collection of characters mounted on rotating shafts. As they turn, they appear like circus acrobatic clowns performing for an audience.
Susan has also designed another performance piece called Nervous People which are characters on radio-controlled platforms that move around stage briefly and then “spaz out.”
The Cartwheels Gizmo Box and Nervous People were exhibited at RoboFest 7.
These pieces are part of a series of theatrical robots and performance art being designed for stage performance. Brooks Coleman is directing the robot theatre movement.
RoboFest 7 Press Release
URGENT – FOR IMMEDIATE RELEASE
| July 4th, 1996 FOR FURTHER INFORMATION CONTACT : The Robot Group P.O. Box 164334 Austin, Texas 78716 512-288-9135 http://www.robotgroup.org robo@robotgroup.org We interrupt this regularly scheduled program to bring you an important announcement. Local city officials were notified today of an impending invasion. The group claiming responsibility for the warning is none other than The Robot Group. The group made up of artists and engineers has quietly gone about creating robotic art forms for over seven years without incident. The Robot Group a local hi-tech arts organization well known for its annual technology festival RoboFest and as yet has no confirmed connections to terrorist groups. There are few details about the invasion other than a specific time frame. The invasion is scheduled to begin on September 14th and will target the University of Texas area. There are unsubstantiated rumors that the invading force will use robots to conquer the Dobie Mall tower. The Robot Group would not comment on this rumor fearing retribution from the “outside force”. The Robot Group claims that they are not responsible for the immanent [sic] invasion of Austin and are simply acting as the conduit for this warning. The group claims they were contacted and infiltrated by “outside forces” earlier this month. “These outside forces are way outside of our normal sphere of influence” claim the group “but they are forces that we have no control over”. The group would not elaborate on how this “outside force” made its initial contact or how they have taken control of The Robot Group. They could only add that the warning about the upcoming invasion was all that they could safely communicate. The threat to Austin citizens and property is minimal as long as we cooperate they say. “Our cooperation is really quite simple. The only thing the invaders require is attendance to this year’s RoboFest” the group went on to say. For some unspecified reason this controlling outside force is demanding that thousands of Austin citizens be in attendance for a special message on September 14th and 15th. What will occur if the demands of the invading force are not met remains to be seen. The Robot Group claims that the “outsiders” have the ability to watch us constantly and that they know our every move. As proof of their ability to watch us closely from the sky, the invaders have commandeered one of the group’s blimps and will use it to monitor the invasion from the airspace around the Dobie Mall Tower. Robot Invasion of Austin It’s coming : the time to bias your transistors and heat up your resistors and march to RoboFest 7. The Robot Group will be hosting their seventh annual technology festival on September 14th and 15th in the Dobie Mall. This year’s festival will be the entertainment event of the year for robots and robot lovers of all ages. The Robot Group wants the City of Austin to be recognized as the “Robot Capital of the World” and this is the first step in gaining that well deserved recognition. Every year the group assembles and re-assembles the dozens of robotic creations, that have graced the pages of Newsweek, Mondo 2000 and Fringeware Review, specifically for RoboFest. This year the robots are going back to school. RoboFest 7 will be held in Dobie Mall a stone’s throw away from the University of Texas and will feature many guest speakers and exhibits from our prestigious University. In addition the group’s most recent creations will continue to amaze the Austin audience. Plans for this year’s RoboFest include an outdoor flying blimp, a hexapod walker, an army of cardboard robots, and RoboVision a new telepresence application using video feeds from the outdoor blimp. This year’s festival also includes a tie-in film festival with a robotic theme. The Robot Group will be presenting three classic films in conjunction with RoboFest. The film festival will be showing at Dobie Theatre which is also located in Dobie Mall. The films are two 50’s era sci-fi classics “The Day the Earth Stood Still” and “Forbidden Planet” and the ‘82 mega cult classic “Blade Runner”. The “Blade Runner” print will be the 35 mm Director’s Cut of the film and it will close both the movie festival and RoboFest 7. Admission for the two day festival is $4.00 for adults and $2.00 for children. The films will each have an admission price of $3.50. One hour free parking is available in the Dobie Mall parking garage located on Whitis Street across from Dobie Mall. |
| Resistance is futile Austin will be invaded come September. Join us or you’ll regret it. |
Editor’s note : The text of the original press release has been preserved without editing for spelling or grammar. Some links have been deleted whereas the others have been updated.