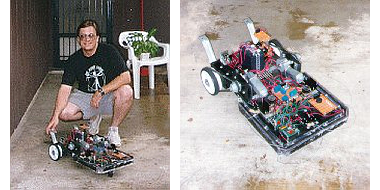
Eric Lundquist‘s Mobile Robotic Platform was an experimental built-from-scratch design with several unique features. Its behavior was very moth-like in that it chased the brightest light that it could detect. Obstacles were detected and avoided with feeler wires on 3 sides.
The brains of the Mobile Robotic Platform were a Parallax BASIC Stamp I providing 8 I/O lines and programming in a dialect of BASIC. Eric added a Stamp Extender that provided an additional 16 I/O lines.
The BASIC Stamp drove the motor and direction relays, the LEDs, and the Piezo buzzer. It also monitored the status of bumpers and polled light levels from its 3 photocell “eyes”.
The base was painted pine shelving material. Not only was this low cost, it did not require any specialized tools to work aside from a circular saw. It also made it exceptionally easy to mount, fasten, and rearrange things.
Eric’s ultimate goal with this project was to add several more BASIC Stamp controllers to make a distributed parallel architecture. This would have allowed more complex behavioral responses and interactions with the environment.
Mobile Robotic Platform