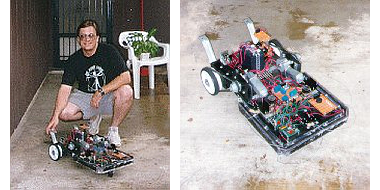
Eric Lundquist‘s Mobile Robotic Platform was an experimental built-from-scratch design with several unique features. Its behavior was very moth-like in that it chased the brightest light that it could detect. Obstacles were detected and avoided with feeler wires on 3 sides.
The brains of the Mobile Robotic Platform were a Parallax BASIC Stamp I providing 8 I/O lines and programming in a dialect of BASIC. Eric added a Stamp Extender that provided an additional 16 I/O lines.
The BASIC Stamp drove the motor and direction relays, the LEDs, and the Piezo buzzer. It also monitored the status of bumpers and polled light levels from its 3 photocell “eyes”.
The base was painted pine shelving material. Not only was this low cost, it did not require any specialized tools to work aside from a circular saw. It also made it exceptionally easy to mount, fasten, and rearrange things.
Eric’s ultimate goal with this project was to add several more BASIC Stamp controllers to make a distributed parallel architecture. This would have allowed more complex behavioral responses and interactions with the environment.
Month: December 1996
Negative Head
[Editor’s note : This information was extracted from an entry in an old version of The Robot Group web site archived by the Wayback Machine on 1996-12-04. Sorry, no photographs have emerged to-date.]
Negative Head is another face character for the planned robot theatre performance being directed by Brooks Coleman. The Negative Head is made from street lamp parts and servos. It creates face movements by overlaying transparent patterns to grids.